Zvonko Vugreshek
Architect, Computational Designer, Fabricator
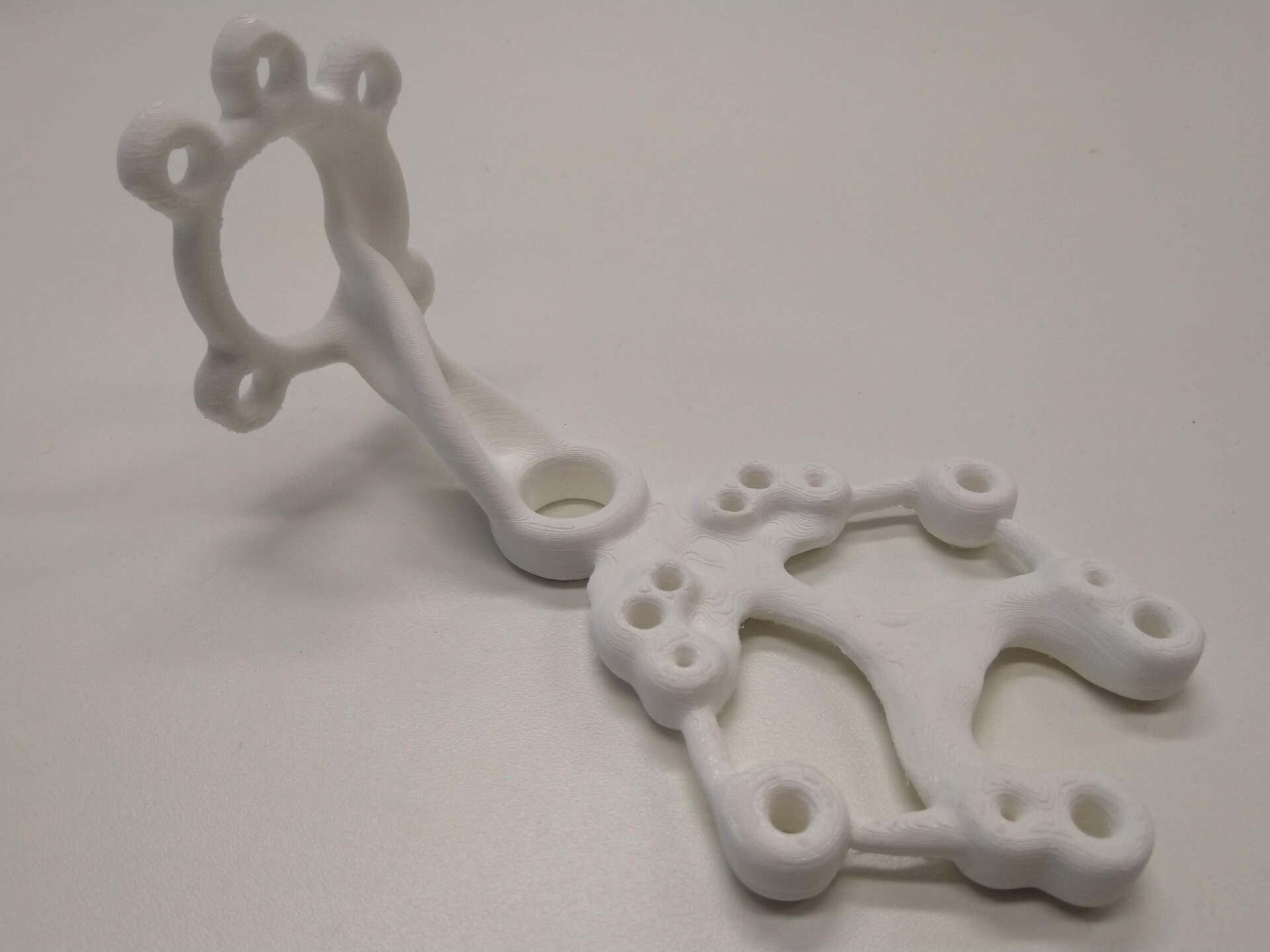
Rplidar a2 -> UR10
Adapter to establish a connection between a UR10 robot and a rplidar a2 (lidar) scanner







Mass stiffness optimisation
Min mass optimisation


Adapter to establish a connection between a UR10 robot and a rplidar a2 (lidar) scanner
Mass stiffness optimisation
Min mass optimisation